Руководство по эксплуатации
Скачать Руководство по эксплуатации — 940.50 Kб
Настоящее руководство по эксплуатации предназначено для ознакомления обслуживающего персонала с конструкцией, принципом действия, техническим обслуживанием и эксплуатацией микропроцессорного программируемых модулей для измерений, контроля и регулирования температуры УМКТ1(У)(ПИД) и УМКТ1(У)(ПИД-К) (далее именуемые "прибор").
Настоящее РЭ распространяется на приборы УМКТ1(У)(ПИД) и УМКТ1(У)(ПИД-К), изготовленных согласно ТУ 4217-001-54012749-2002. Изготавливается несколько модификаций прибора, отличающихся конструктивным исполнением и типом встроенных выходных устройств управления.
1. Назначение
1.1. Модуль контроля температуры совместно с входными датчиками предназначены для контроля температуры, давления, влажности либо других физических величин, отображения их текущих значений на встроенном цифровом индикаторе и управления технологическими производственными процессами. Приборы могут использоваться в промышленности, коммунальном, сельском хозяйстве и других отраслях.
1.2. Функциональные параметры измерения и регулирования задаются пользователем при программировании и сохраняются при отключении питания в энергонезависимой памяти прибора.
1.3. Приборы имеют встроенный интерфейс стандарта RS-485 для связи с персональным компьютером и объединения в автоматизированные системы управления технологическими процессами.
2. Модификации прибора
2.1. По варианту конструкции приборы отличаются исполнением корпусов, предназначенных для настенного или щитового крепления на объектах. Эскизы корпусов приведены в Приложении 1. Типы крепления корпуса:
- Н1 – настенный, с размерами 138х105х59 мм.
- Щ2 – щитовой, с размерами 96х48х100 мм.
2.2. Типы встроенных выходных устройств прибора:
- Р - реле электромагнитные.
- Т - транзисторные оптопары n-р-n структуры.
- С - симисторные оптопары.
- К - выход управления внешним твердотельным реле.
2.3. Приборы других модификаций (по классу точности, питающему напряжению, и др.) оговариваются при заказе.
Информация о модификации прибора при заказе:
УМКТ1(у)(ПИД-К)-хх-х-RS.
"-К" для управления задвижкой ----------------------/ / / /
Тип корпуса ----------------------------------------------------/ / /
Тип выходных устройств -------------------------------------/ /
Наличие интерфейса RS-485 -------------------------------/
3.Технические характеристики и условия эксплуатации
3.1. Типы входных датчиков:
Таблица №1
|
Тип датчика
|
Измеряемый диапазон
|
Индикация при программировании
|
|
Термопреобразователи сопротивления по ГОСТ 6651-94
|
||
|
ТСП 100П W100=1,391
|
-200…+750°С
|
P'100
|
|
ТСП 50П W100=1,391
|
-200…+750°С
|
P' 50
|
|
ТСП 100П W100=1,385 (Pt100)
|
-200…+750°С
|
P100
|
|
ТСП 50П W100=1,385 (Pt50)
|
-200…+750°С
|
P 50
|
|
ТСМ 100М W100=1,428
|
-50…+200°С
|
C'100
|
|
TCM 50M W100=1,428
|
-50…+200°С
|
C' 50
|
|
ТСМ 100М W100=1,426 (Cu100)
|
-200…+200°С
|
C100
|
|
TCM 50M W100=1,426 (Cu50)
|
-200…+200°С
|
C 50
|
|
ТСМ 53М W100=1,426 (гр.23) (ГОСТ 6651-59)
|
-200…+200°С
|
Cu53
|
|
ТСМ 46П W100=1,385 (гр.21) (ГОСТ 6651-59)
|
-200…+650°С
|
Pt46
|
|
Термопары по ГОСТ Р 8.585-2001
|
||
|
ТВР (А-1)
|
0…+2500°С
|
E-A1
|
|
ТВР (А-2)
|
0…+1800°С
|
E-A2
|
|
ТВР (А-3)
|
0…+1800°С
|
E-A3
|
|
ТПР (В)
|
+250…+1820°С
|
E--b
|
|
ТЖК (J)
|
-210…+1200°С
|
E--J
|
|
TXA (K)
|
-270…+1300°С
|
E--H
|
|
TXK (L)
|
-200…+800°С
|
E--L
|
|
TXK (E)
|
-270…+1000°С
|
E--E
|
|
ТНН (N)
|
-270…+1300°С
|
E--n
|
|
ТПП (R)
|
-50…+1750°С
|
E--r
|
|
ТПП (S)
|
-50…+1750°С
|
E--S
|
|
ТMK (T)
|
-270…+400°С
|
E--t
|
|
Датчики с унифицированным выходом по току (сопротивление внешнего шунта 100 Ом) и напряжению по ГОСТ 26.011-80
|
||
|
0…5 мА
|
0…100%
|
I0_5
|
|
0…20 мА
|
0…100%
|
I4.20
|
|
4…20 мА
|
0…100%
|
I0.20
|
|
0…1 В
|
0…100%
|
U0-1
|
|
-50…+50 мВ
|
0…100%
|
U-50
|
| Время опроса входного канала, сек | 1 |
| Предельно допустимая основная приведенная погрешность (без учета погрешности датчика), %, не хуже | |
| для теромосопротивлений и датчиков тока и напряжения | 0,25 |
| для термопар | 0,5 |
| Разрешающая способность, °С | |
| от -100°С до +1000°С | 0,1 |
| ниже -100°С и выше +1000°С | 1 |
| Количество выходных устройств | 2 |
| Максимальный ток, коммутируемый контактами реле при ~220В 50Гц, А | 5 |
| Максимальный ток нагрузки транзисторной оптопары при напряжении 50 В постоянного тока, мА | 50 |
| Максимальный ток нагрузки симисторной оптопары при напряжении до 400 В, мА | 100 |
| Максимальный ток нагрузки выхода управления твердотельным реле, мА | 50 |
| Интерфейс связи УМКТ | RS-485 |
| Длина линии связи прибора с ИМ485, не более, м | 1200 |
| Скорость передачи данных, бит/с | 19200 |
| Напряжение питания, В | ~110...~245 |
| Частота питающей электросети, Гц | 50 |
| Потребляемая мощность, не более, Вт | 6 |
| Температура окружающей среды, °С | +5...+50 |
| Относительная влажность воздуха (при t = 35°С), % | 30...80 |
| Атмосферное давление, кПа | 86...107 |
| Степень защиты корпуса настенного исполнения (Н1) | IP54 |
| Габаритные размеры корпуса Н1 | 138х105х59 |
| Степень защиты корпуса Щ2 со стороны передней панели | IP20 |
| Габаритные размеры корпуса Щ2 | 96х48х100 |
| Масса прибора, не более, кГ | 0,5 |
4.Устройство и принцип работы прибора.
4.1. Функциональная схема прибора приведена на рис. 1.
Рис. 1
Прибор состоит из одного входного канала, блока индикации и управления, одного или двух (для модификации "-К") выходных каналов ПИД, одного выходного канала сигнализации (в модификации "-К" отсутствует), микропроцессора и интерфейса.
- к входному каналу подключается датчик - термопреобразователь сопротивления, термопара, датчик с унифицированным выходным сигналом тока или напряжения;
- блок индикации и управления служит для отображения текущих параметров, программирования и управления прибором;
- выходной канал ПИД управляет объектом управления;
- выходной канал сигнализации триггерного типа служит для сигнализации о нахождении входного параметра в определенной пользователем области значений;
- микропроцессор по программе и в соответствии с запрограммированными пользователями функциональными параметрами производит обработку сигналов входного датчика, цифровую фильтрацию измеренных значений, вывод данных на блок индикации, опрос кнопок управления, обслуживание интерфейса и формирует сигналы управления выходными устройствами;
- интерфейс предназначен для связи с персональным компьютером и объединения в автоматизированные системы управления.
4.2. Конструкция прибора.
Прибор конструктивно выполнен в пластмассовом корпусе, предназначенном для щитового или настенного крепления. Эскизы корпусов с габаритными и установочными размерами приведены в Приложении 1. Все элементы прибора размещены на двух печатных платах (плата процессора и плата индикации). На лицевой панели расположены клавиатура управления прибором, цифровой индикатор и светодиоды. На задней - присоединительный клеммник. Клеммник для внешних присоединений (датчика, электропитания, цепей интерфейса) у приборов щитового крепления находится на задней стенке. В приборах настенного крепления клеммник расположен под верхней крышкой. В отверстиях для подвода внешних связей корпуса Н1 установлены герметичные кабельные вводы.
5. Указание мер безопасности
5.1. По способу защиты от поражения электрическим током прибор соответствует классу 0 по ГОСТ 12.2.007.0-75.
5.2. В приборе используется опасное для жизни напряжение. При установке прибора, устранении неисправностей и техническом обслуживании необходимо отключить прибор и подключаемые устройства от питающей сети.
5.3. Не допускается попадание влаги на контакты клеммника и внутренние элементы прибора. Запрещается использование прибора в агрессивных средах с содержанием в атмосфере кислот, щелочей, масел т.п.
5.4. Подключение, техническое обслуживание и программирование прибора должны производиться квалифицированными специалистами, изучившими настоящее руководство по эксплуатации.
5.5. При эксплуатации, техобслуживании и поверке прибора необходимо соблюдать требования ГОСТ 12.3.019-80, «Правил технической эксплуатации электроустановок потребителей» и «Правил техники безопасности при эксплуатации электроустановок потребителей».
Внимание! В связи с наличием на клеммнике опасного для жизни напряжения приборы в корпусах щитового исполнения (модификация УМКТх(У)-Щ2-х), должны устанавливаться в щитах управления, доступных только квалифицированным специалистам.
6. Монтаж прибора и подготовка к работе
6.1. Установить прибор на штатное место и закрепить его. Габаритные и присоединительные размеры приборов в различных вариантах корпусов приведены в Приложении 1.
6.2. Проложить линии связи для соединения прибора с питающим напряжением, входным датчиком, интерфейсом связи (если прибор подключается к РС) и исполнительными механизмами. При выполнении монтажных работ использовать только стандартный инструмент.
6.3. При монтаже внешних связей необходимо обеспечить надежный контакт с клеммником прибора. Сечение жил не должно превышать 1,5 кв. мм. Подсоединение проводов во всех вариантах корпусов осуществляется под винт. Для доступа к клеммнику в приборе настенного крепления необходимо снять с него верхнюю крышку.
6.4. Подключение датчика.
Подключение датчика осуществляется в соответствии со схемой, приведенной в Приложении 2.
Тип датчика устанавливается пользователем при программировании прибора.
Во избежание поломки измерительной части прибора присоединение связей необходимо производить, начиная с подключения датчика к линии, а затем линии к клеммнику прибора.
Для исключения проникновения промышленных помех в измерительную схему прибора линию связи датчика с прибором рекомендуется экранировать, а экран заземлить.
Запрещается объединять "землю" прибора с заземлением оборудования. Не допускается прокладка линии связи датчика с прибором в одной трубе с силовыми проводами, создающими высокочастотные, импульсные и т.п. помехи. Параметры соединительных линий приведены в таблице 2.
Таблица 2
|
Тип датчика
|
Длина линии(макс.), м
|
Сопротивление линии (макс.), Ом
|
Тип линии
|
|
Термосопротивление
|
100
|
10
|
Трехпроводная
|
|
Термопара
|
25
|
100
|
Двухпроводная термокомпенсационным проводом
|
|
Датчик с унифицированным выходом по току
|
100
|
100
|
Двухпроводная
|
|
Датчик с унифицированным выходом по напряжению
|
100
|
5
|
Двухпроводная
|
6.4.1 Подключение термопреобразователя сопротивления.
В приборе используется трехпроводная схема подключения термопреобразователя сопротивления. К одному из выводов термосопротивления Rt подсоединяются два провода, а третий подключается к другому выводу Rt. Такая схема позволяет компенсировать сопротивление соединительных проводов. При этом необходимо соблюдать условие равенства сопротивлений всех трех проводов.
Термопреобразователи сопротивления могут подключаться к прибору и с использованием двухпроводной линии, но в этом случае измерения будут проводиться без компенсации сопротивления соединительной линии и, вследствие зависимости этого сопротивления от температуры окружающей среды, показания прибора будут колебаться вместе с внешней температурой. В случае использования двухпроводной линии необходимо при подготовке прибора к работе выполнить следующие действия:
- перед началом работы установить перемычку между контактами компенсационных проводов (контакты 8-9) а двухпроводную линию подключить ко входу прибора (соответственно к контактам 7 и 8);
- к противоположным от прибора концам линии связи «прибор - термопреобразователь» вместо термопреобразователя подключить магазин сопротивлений с классом точности не хуже 0,05;
- установить на магазине значение, равное сопротивлению термопреобразователя при температуре 0ОС (50 или 100 Ом, в зависимости от типа датчика);
- подать на прибор питание и через 15-20 мин. по показаниям цифрового индикатора определить величину отклонения температуры от 0ОС по каждому каналу измерения;
- ввести в память прибора значение коррекции «сдвиг характеристики» для каждого канала в соответствующем параметре, равное по величине показаниям прибора, но с противоположным знаком;
- проверить правильность задания коррекции, для этого не изменяя значения сопротивления на магазине, перевести прибор в режим измерения и убедится, что при этом его показания равны 0 + 0,2 ОС;
- отключить питание, отсоединить линию связи от магазина сопротивлений и подключить ее к термопреобразователю;
- после выполнения этих действий прибор готов к работе.
6.4.2. Подключение термопар
Термопара подключаются к прибору по двухпроводной схеме. При подключении необходимо соблюдать полярность!!! "Положительный" вывод термопары соединяется с контактом 9, "отрицательный" - с контактом 7. При необходимости линия связи от термопары до прибора удлиняется термокомпенсационными проводами с термоэлектрическими характеристиками, аналогичными характеристикам материалов термопары (при температурах, близких к температуре в местах пролегания линии связи). В случае применения обычных (не компенсационных) проводов точность работы прибора снизится.
6.4.3. Подключение датчиков с унифицированными выходными сигналами
Датчики с унифицированными выходными сигналами подключаются к прибору по двухпроводной схеме. При подключении необходимо соблюдать полярность!!! Положительный вывод датчика соединяется с контактом 9, отрицательный - с контактом 7. Для корректной работы датчика необходимо правильно запрограммировать параметры An.L и An.H (см. разд. 7.5). При подключении датчиков с унифицированным выходом по току паралельно клеммам необходимо подключить шунт сопротивлением 100Ом±0,1% и ТКС не хуже 25х10-6/С. Для питания датчиков с унифицированным выходом по току используется внешний источник напряжения, величиной, в большинстве случаев, от 18В до 36В. Подключение датчиков с унифицированным выходом по току производится по следующим схемам:
6.5. Подключение исполнительных устройств
Подключение исполнительных устройств производится по схеме соединений (Приложение 2). При подключении исполнительных устройств индуктивного типа (реле, пускатели) рекомендуется для снижения помех паралельно катушке пускателя и как можно ближе к ней установить цепь из последовательно соединенного резистора 47..200 Ом 2 Вт и конденсатора 0.1...0.2 мкФ х 400В.
6.5.1. Подключение к выходу типа "оптотранзистор".
Транзисторная оптопара применяется для управления низковольтным реле (до 50В). Для избежания выхода из строя оптотранзистора из-за большого тока самоиндукции параллельно обмотке реле необходимо установить диод на напряжение не ниже 100В и ток порядка 1А согласно схеме(приведены номера контактов для ВУ1):
6.5.2. Подключение к выходу типа "оптосимистор".
Оптосимистор имеет внутреннюю схему перехода через ноль и включается в цепь управления мощного симистора через ограничивающий резистор Rогр. Величина резистора определяет ток управления симистора. Подключение симистора рекомендуется производить по следующей схеме(приведены номера контактов для ВУ1):
При управлении двумя встречно-включенными тиристорами рекумендуется применять следующую схему(приведены номера контактов для ВУ1):
6.5.3. Подключение к выходу типа "управление твердотельным реле".
Твердотельное реле подключается к прибору согласно схеме(приведены номера контактов для ВУ1):
Примечание: Сопротивление резистора Rогр. равно 100 Ом.
6.6. Подключение сети питания производится по схеме соединений (Приложение 2). При подключении питания следует по возможности использовать фазу сетевого напряжения, свободную от мощных импульсных потребителей энергии (сварочных трансформаторов, часто включаемых мощных ТЭНов и т.п.).
6.7. Подключение УМКТ к РС производится по схеме соединений (Приложение 2). На дальнем конце двухпроводной линии RS-485 паралельно контактам А и В необходимо установить резистор сопротивлением 120 Ом.
6.8. После подключения всех необходимых цепей подать на прибор питание. На цифровом индикаторе на некоторое время появится код датчика и засветятся все светодиоды, после чего прибор перейдет в режим "работа". При исправности датчика и линий связи на индикаторе отобразится текущее значение измеряемого параметра. Если после подачи питания на индикаторе появятся прочерки или показания не соответствуют реальным значениям, проверьте исправность датчика и линии связи, а также правильность их присоединения.
6.9. При проверке исправности необходимо отключить прибор от сети питания. Необходимо использовать при прозвонке связей устройство с напряжением питания не более 5 В. В других случаях необходимо отключить датчик от прибора.
6.10. Введите в прибор необходимые для выполнения технологического процесса параметры регулирования и задайте нужные рабочие режимы. После установки требуемых параметров прибор готов к работе.
7.Работа прибора
7.1. Режимы работы прибора.
При эксплуатации прибор может находиться в одном из двух режимов: "работа" или "программирование". В режиме "работа" производится измерение и отображение на цифровом индикаторе текущих значений входных датчиков, связь с РС и управление выходными устройствами в соответствии с заданными рабочими параметрами. Режим "работа" включается при подаче на прибор напряжения питания. В режиме "программирование" производится настройка рабочих параметров прибора. Переход в режим "программирование" происходит при нажатии на кнопку  (см. гл. 8). Во время нахождении прибора в режиме "программирование" основные фунции измерения входных значений и управления выходными устройствами продолжают функционировать.
(см. гл. 8). Во время нахождении прибора в режиме "программирование" основные фунции измерения входных значений и управления выходными устройствами продолжают функционировать.
7.2. Устройства индикации и органы управления.
Внешний вид лицевых панелей УМКТ1(ПИД) приведен на рисунке 2.
На четырехразрядном индикаторе в режиме "работа" отображается измеренное значение входного сигнала, в режиме "программирование" – значение настраиваемого в данный момент параметра. Четыре прочерка в режиме "работа" сигнализируют об аварийном состоянии входного сигнала (обрыв или замыкание датчика, выход измеряемого значения за пределы измерений и т.п.). Группа светодиодных индикаторов служит для:
- Т1 (индикатор зеленого цвета) – индикатор работы прибора;
- Туст, Ed, Т2уст, ΔТ2 (индикаторы зеленого цвета) – при программировании уставок - уставка для ПИД, полоса нечувствительности, уставка для второго ВУ, дельта уставки второго ВУ соответственно;
- ВУ1 и ВУ2 (индикаторы красного цвета) – состояние ВУ1 и ВУ2 соответственно.
Кнопка  в режиме "работа" служит для выбора входного канала, измеренные значения которого выводятся на индикацию. Кнопка
в режиме "работа" служит для выбора входного канала, измеренные значения которого выводятся на индикацию. Кнопка  в режиме "работа" не оказывает влияния на работу прибора. В режиме "программирование" кнопки и предназначены для ввода кода доступа, увеличения и уменьшения выбранного параметра.
в режиме "работа" не оказывает влияния на работу прибора. В режиме "программирование" кнопки и предназначены для ввода кода доступа, увеличения и уменьшения выбранного параметра.
Кратковременное нажатие на кнопку из режима "работа" переводит прибор в режим программирования уставок. Долговременное (более 6 секунд) нажатие на кнопку переводит прибор в режим программирования функциональных параметров (см. гл. 8). В режиме "программирование" кнопка служит для перехода к программированию следующего параметра и для возврата в режим "работа".
7.3. Коррекция погрешностей датчиков.
Для коррекции погрешностей входных датчиков в приборе существуют параметры "сдвиг характеристики" и "наклон характеристики".
При коррекции типа "сдвиг характеристики" измеренное значение суммируется со значением параметра SH_1.
При коррекции типа "наклон характеристики" измеренное значение умножается на значение параметра Р
7.4. Цифровая фильтрация измерений.
Для повышения качества измерения входные сигналы обрабатываются микропроцессором с помощью цифрового фильтра, позволяющего уменьшить влияние случайных помех на измерение температуры. Работа фильтра описывается двумя параметрами, задаваемыми при программировании: PF- полоса цифрового фильтра и FF- глубина цифрового фильтра. Допустимые значения и заводские установки параметров цифровых фильтров приведены в таблице № 3.
7.4.1. Параметр PF (полоса цифрового фильтра) позволяет защитить измерительный тракт от единичных помех. Полоса фильтра задается в единицах измеряемой величины. Если полученное значение отличается от предыдущего на величину, большую, чем установлено в этом параметре, то производятся повторные измерения. В течении этого времени на индикаторе остается старое значение.
Как видно из рисунка 4, малая полоса фильтра приводит к замедлению реакции прибора на быстрое изменение входной величины. Поэтому при малом уровне помех или при работе с быстроменяющимися процессами рекомендуется увеличить значение параметра. В случае сильных помех следует уменьшить значение параметра для устранения их влияния на работу прибора. В этом случае возможно уменьшение быстродействия из-за повторных измерений.
рис. 4
7.4.2. Параметр FF (глубина цифрового фильтра) - позволяет добиться более плавного изменения показаний прибора. При значении параметра равном 1 фильтр выключен. Увеличение значения параметра FF приводит к увеличению помехозащищенности, но повышает инерционность прибора. Уменьшение значения приводит к более быстрой реакции прибора на скачкообразные изменения контролируемой величины, но снижает помехозащищенность измерительного канала. Наглядно действие параметра показано на рисунке 5.
рис. 5
7.5. Масштабные коэффициенты
При выборе в качестве входных датчиков с унифицированными выходами по току или напряжению необходимо запрограммировать значения параметров An.L и An.H. Параметр An.L должен соответствовать нижнему пределу измерения подключаемого датчика, An.H - верхнему пределу. Параметры An.L и An.H задаются в единицах той физической величины, которая измеряется. Влияние параметров An.L и An.H на работу прибора проиллюстрировано на рис. 6.
Рис. 6
7.6. Компенсация температуры "холодного" спая термопары.
Термопара генерирует термоЭДС, зависящую от разницы температур рабочего спая и свободных ("холодных") концов. (При равенстве температуры рабочего и свободного концов термопара ЭДС не вырабатывает, какой бы высокой или низкой эта температура не была) Следовательно, для получения температуры рабочего спая термопары, выраженной в абсолютных величинах (С), к вычисленной разнице температур рабочего и холодного концов термопары необходимо прибавить температуру ее холодного конца. Для этого в приборе предусмотрена автоматическая компенсация температуры "холодного" спая. При работе с термопарой прибор, с одной стороны, вычисляет температуру рабочего спая термопары относительно клеммной колодки (основываясь на термоЭДС) и, с другой стороны, температуру самой клеммной колодки (основываясь на измерениях полупроводникового датчика температуры, установленного внутри прибора вплотную к клеммам). Индикатором отображается сумма этих температур. Если по каким-либо причинам возникнет необходимость в отключении автоматической компенсации температуры "холодного" спая, пользователь может это сделать введя код 9182 (необходимые действия для ввода кода доступа описаны в главе 8 "Программирование прибора"). Для повторного включения автоматической компенсации температуры "холодного" спая нужно ввести код 0001.
7.7. Выходные устройства.
ПИД-регулятор УМКТ1(У)(ПИД) имеет два независимых выходных устройства. ВУ1 формирует сигналы управления внешним оборудованием, обеспечивая регулирование по пропорционально-интегрально-дифференциальному (ПИД) закону в соответствии с заданной пользователем логикой работы. Режим работы ВУ2 - сравнение измеренной величины с эталонной (уставкой) и изменение состояния ВУ при пересечении порогового уровня (гистерезиса) в зависимости от заданной логики работы.
ПИД-регулятор для управления задвижкой УМКТ1(У)(ПИД-К) имеет два зависимых выходных устройства. ВУ1 и ВУ2 формируют сигналы "больше" и "меньше" соответственно, обеспечивая управление задвижкой по пропорционально-позиционному алгоритму. В один о и тот же момент времени может быть включено либо только одно из ВУ либо оба выключены.
Выходные устройства (дискретные, ключевого типа - электромагнитные реле, транзисторные оптопары, симисторные оптопары либо токовый выход управления твердотельным реле) используются для управления (включения/выключения) нагрузкой непосредственно, или через более мощные управляющие элементы (пускатели, реле, тиристоры или симисторы).
7.8. Логика работы ПИД-регулятора.
Основные понятия и сокращения.
Tуст. – уставка, °C
T(i) – текущее значение температуры, °C
T(i-1) – значение температуры при предыдущем измерении, °C
Err(i) = Tуст. - T(i), текущее рассогласование, °C
Err(i-1) = Tуст. - T(i-1), предыдущее рассогласование, °C
Hp – полоса пропорциональности, °C
Ti – постоянная интегрирования
Td – постоянная дифференцирования
∆T – период квантования (интервал времени между двумя соседними измерениями)
Uп(i) – предварительное значение ПИД
U(i) – выходной сигнал регулятора, %
Принцип регулирования
Зона действия ПИД-регулятора определяется параметром Hp. Если -Hp > Err(i) > Hp, прибор функционирует как двухпозиционный регулятор. Т.е. при Err(i) > Hp U(i) = 100%, Err(i) < -Hp U(i) = 0%.
Вычисленный ПИД-звеном управляющий сигнал определяется тремя составляющими:
Рассмотрим каждую составляющую отдельно:
Пропорциональная составляющая (ПС)
В пределах полосы пропорциональности Hp ПС вносит в управляющий сигнал вклад, линейно зависящий от Hp, текущего рассогласования и с соответствующим этому рассогласованию знаком. Т.е., чем больше рассогласование, тем больше ПС. При недорегулировании ПС положительна, при перерегулировании – отрицательна.
Интегральная составляющая (ИС)
В пределах полосы пропорциональности Hp ИС вносит в управляющий сигнал вклад, зависящий от накопленной суммы рассогласований, полосы пропорциональности Hp и постоянной интегрирования Ti. Чем дольше рассогласование сохраняет знак, тем сильнее влияние ИС. Чем больше постоянная интегрирования Ti, тем слабее влияние ИС.
Дифференциальная составляющая (ДС)
В пределах полосы пропорциональности Hp ДС вносит в управляющий сигнал вклад, зависящий от скорости изменения температуры, полосы пропорциональности Hp и постоянной дифференцирования Td. Знак ДС противоположен скачку контролируемого параметра, т.е. ДС стремится «сгладить» резкие изменения контролируемой величины, предотвращая возникновение в системе колебаний. Чем быстрее изменяется температура, тем сильнее влияние ДС. Чем меньше постоянная дифференцирования Td, тем слабее влияние ДС.
При управлении задвижкой
В приборе УМКТ1(У)(ПИД-К), предназначенном для управления задвижкой без датчика положения, принимается, что сама задвижка выполняет роль интегратора и значение интегральной составляющей, полученной при вычислении управляющего сигнала ПИД, отбрасывается. Параметр Ti не оказывает действия на регулятор УМКТ1(У)(ПИД-К).
Выходные сигналы регулятора
После вычисления Uп(i) прибор анализирует полученное значение и определяет итоговый управляющий сигнал U(i) следующим образом:
В общем случае U(i) = Uп(i)*100%
Если Uп(i) > 1, U(i) = 100%.
Если Uп(i) < 0, U(i) = 0%. (При управлении однонаправленными исполнительными устройствами, УМКТ1(У)(ПИД))
Если Uп(i) < -1, U(i) = 100%.(При управлении реверсивными исполнительными устройствами, УМКТ1(У)(ПИД-К))
Возможные состояния выходов прибора отражены в таблице:
|
Uп(i)
|
Выход "больше"
|
Выход "меньше"
|
||
|
УМКТ1(У)(ПИД)
|
УМКТ1(У)(ПИД-К)
|
УМКТ1(У)(ПИД)
|
УМКТ1(У)(ПИД-К)
|
|
|
от 0 до 1
|
Uп(i)*100%
|
Uп(i)*100%
|
Определяется параметром "bd"
|
Выкл
|
|
от -1 до 0
|
Выкл
|
Выкл
|
Uп(i)*100%
|
|
|
< -1
|
Выкл
|
Выкл
|
Вкл
|
|
|
>1
|
Вкл
|
Вкл
|
Выкл
|
|
Ограничение интегральной суммы
Если рассогласование долго не меняет знак, ИС может стать излишне большой, что приведёт к нежелательному перерегулированию. Поэтому в приборах УМКТ производится ограничение ИС. Делается это по следующему алгоритму:
если (ПС+ИС) > 1, то ИС = 1 - ПС;
если (ПС+ИС) < 0, то ИС = 0 - ПС (УМКТ1(У)(ПИД));
если (ПС+ИС) < -1, то ИС = -1 - ПС (УМКТ1(У)(ПИД-К)).
Скорость набега на уставку.
Параметр SP служит для ограничения скорости изменения температуры. При SP = 0 ограничение отсутствует и температура изменяется со скоростью, обусловленной работой регулятора (кривая 1). При ненулевом значении SP прибор старается ограничить скорость изменения температуры величиной, равной SP градусов в минуту (кривая 2). Зона ограничения показана прямой 3. Эффективность ограничения зависит от свойств объекта управления.
Ограничение управляющего сигнала
Если расчетное управляющее воздействие окажется больше значения параметра PA либо меньше значения параметра PI, сигнал на выходе регулятора будет иметь следующее значение:
если U(i) > PA, то U(i) = PA;
если U(i) < PI, то U(i) = PI;
Период следования импульсов ШИМ
Параметр tP определяет размер кадра ШИМ в секундах. Для исключения ненужных срабатываний реле рекомендуется значения этого параметра увеличивать до тех пор, пока он не начнет оказывать отрицательного воздействия на точность регулирования. Чем инерционее объект, тем большее значение tP можно установить без последствий для точности регулирования.
Зона нечувствительности
Для исключения ложных срабатываний регулятора в окрестностях уставки рассогласование вычисляется следующим образом:
если -Ed > Err(i) > Ed, то Err(i) = 0;
если Err(i) > Ed, то Err(i) = Err(i) - Ed;
если Err(i) < -Ed, то Err(i) = Err(i) + Ed;
где Ed – зона нечувствительности.
Следует помнить, что чрезмерное увеличение Ed ухудшает точность регулирования.
Функции дополнительного ВУ
В приборах, предназначенных для работы с однонаправленными исполнительными устройствами (УМКТ1(У)(ПИД)) ВУ2 может выполнять дополнительные функции, определяемые параметром bd, уставкой ВУ2 T2уст и гистерезисом ВУ2 T2:
|
bd
|
Описание
|
Функция
|
|
0
|
Выключено
|
|
|
1
|
Сигнализация о выходе за заданный интервал
|
Если (T2уст - êT2) > T(i) > (T2уст + êT2), то ВУ2 вкл.; иначе ВУ2 выкл.;
|
|
2
|
Сигнализация о входе в заданный интервал
|
Если (T2уст - êT2) > T(i) > (T2уст + êT2), то ВУ2 выкл.; иначе ВУ2 вкл.;
|
|
3
|
Сигнализация о превышении уставки 2
|
Если T(i) > (T2уст + êT2), то ВУ2 вкл.; иначе ВУ2 выкл.;
|
|
4
|
Сигнализация о нахождении ниже уставки 2
|
Если T(i) < (T2уст - êT2), то ВУ2 вкл.; иначе ВУ2 выкл.;
|
7.9. Настройка ПИД-регулятора
В приборах УМКТ предусмотрена процедура автоматической настройки параметров ПИД-регулирования на конкретный объект. Для выполнения автонастройки удерживайте кнопку "F" нажатой более 6 сек., после чего введите код 1941. Алгоритм автонастройки дает приемлемые результаты для большинства ОУ.
Внимание! При выполнении автонастройки система совершает два колебания с неизвестной заранее амплитудой. Если по условиям технологического процесса значимый выход за уставку неприемлем, параметры ПИД-регулятора следует настроить вручную, начав с максимального значения Hp.
Если по каким-либо причинам значения коэффициентов ПИД-регулятора, полученные при автоматической настройке оказались неоптимальными, следует подстроить их вручную.
В качестве начальных значений Hp, Ti и Td рекомендуется использовать значения, полученные при автоматической настройке. Ручную настройку рекомендуется проводить экспериментально в три этапа:
1. определение необходимой полосы пропорциональности
2. определение оптимальной постоянной дифференцирования
3. определение оптимальной постоянной интегрирования
Этап 1.
Установить Ti = 0 и Td = 0. Подбором Hp добиться переходной характеристики, близкой к 2 (для систем, допускающих перерегулирование) или 4 (для систем, не допускающих перерегулирование). Следует помнить, что уменьшение Hp ведет к более быстрому достижению уставки, но увеличивает выбросы на переходной характеристике (кривые 2, 3), а при превышении критического уровня приводит к возникновению незатухающих колебаний (кривая 1). Увеличение Hp снижает выбросы, но увеличивает время выхода на уставку (кривая 4).
Этап 2.
Если в процессе настройки Hp была получена кривая 4 или если не предполагается использовать дифференциальную составляющую – установить Td = 0 и перейти к этапу 3.
Для настройки дифф. компоненты подбором Td добиться переходной характеристики, близкой к 2. Уменьшение Td снижает эффективность влияния дифференциального звена (кривая 1), увеличение Td уменьшает выбросы, обусловленные пропорциональной компонентой, но при превышении оптимального значения начинает вносить собственные колебания (кривая 3).
Этап 3.
Подбором Ti добиться переходной характеристики, близкой к 3. Уменьшение Ti ведет к более быстрому достижению уставки, но увеличивает выбросы на переходной характеристике (кривая 2), а при превышении критического уровня приводит к возникновению незатухающих колебаний (кривая 1). Увеличение Ti снижает выбросы, но увеличивает время выхода на уставку (кривая 4).
Для ручного ввода или просмотра параметров ПИД-регулятора удерживайте кнопку "F" нажатой более 6 сек., после чего введите код 5326.
|
Название параметра
|
Индицируемые символы
|
Мин. значение
|
Макс. значение
|
Значение по умолчанию
|
|
Полоса пропорциональности
|
HP
|
1
|
6500
|
10
|
|
Постоянная интегрирования
|
ti
|
0(выкл.)
|
30000
|
100
|
|
Постоянная дифференцирования
|
td
|
0(выкл.)
|
30000
|
20
|
|
Период управляющих импульсов
|
tP
|
1
|
100
|
1
|
|
Скорость набега на уставку
|
SP
|
0(выкл.)
|
1000
|
0
|
|
Макс. мощность
|
PA
|
1
|
100
|
100
|
|
Мин. мощность
|
PI
|
0
|
99
|
0
|
7.10. Интерфейс УМКТ.
Для связи с персональным компьютером и объединения в автоматизированные системы управления технологическими процессами УМКТ имеют встроенный интерфейс спецификации RS-485. УМКТ подключаются к СОМ порту через интерфейсный модуль ИМ-485 параллельно по двухпроводной линии. Скорость передачи данных 19200 бит/с. Каждый прибор имеет свой интерфейсный номер от 1 до 255 (задается при программировании в параметре n.xxx). Подключение УМКТ к РС производится по схеме соединений (Приложение 2). Описания ИМ-485, протокола передачи данных и работы УМКТ в составе систем находится на http://www.fea-samara.ru.
8. Программирование прибора
Режим "программирование" предназначен для задания и записи в энергонезависимую память прибора требуемых при эксплуатации рабочих параметров измерения и регулирования. Заданные значения параметров сохраняются в памяти прибора при выключении питания.
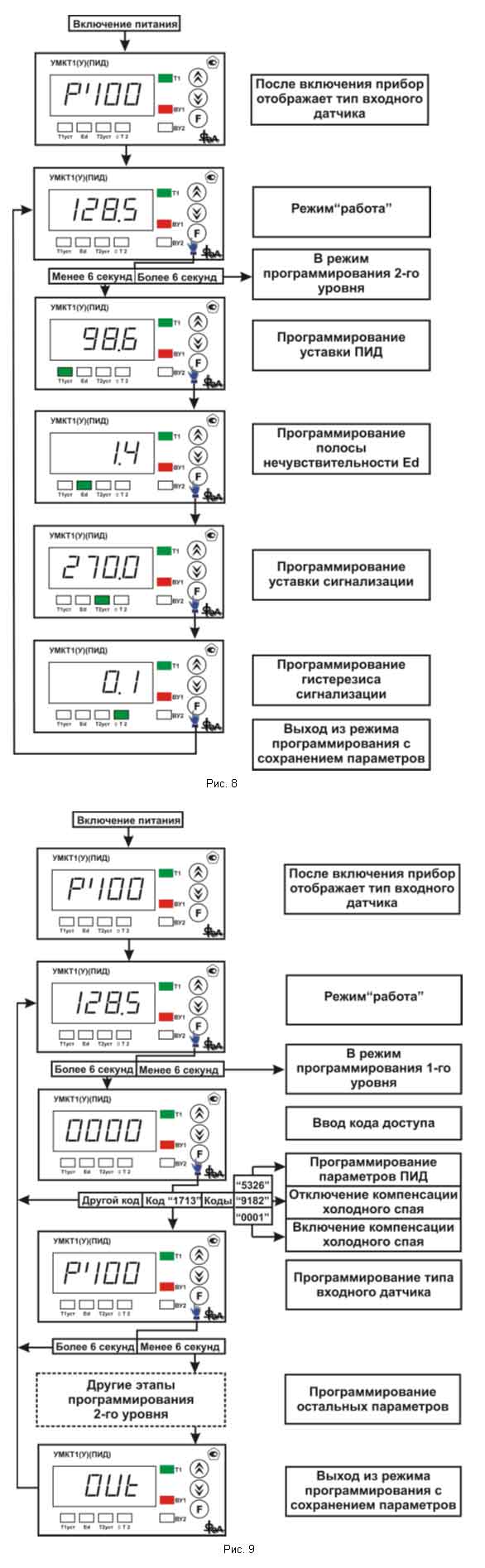
В ПИД-регуляторах УМКТ1(У)(ПИД) и УМКТ1(У)(ПИД-К) установлено два уровня программирования. На первом уровне осуществляется просмотр и изменение значений параметров регулирования уставок Т1уст, Ed, Т2уст, Т2. На втором уровне программирования осуществляется просмотр и изменение функциональных параметров прибора.
Вход на первый уровень программирования осуществляется кратковременным нажатием на кнопку . Последовательность работы с прибором на этом уровне приведена на рис. 8. Кнопки и предназначены соответственно для увеличения и уменьшения выбранного параметра. Однократное нажатие на кнопку изменяет параметр на единицу. При удерживании кнопки изменение происходит автоматически с возрастанием скорости изменения. Переход от одного параметра к другому осуществляется кратковременным нажатием на кнопку . Если в течении 20 секунд не производится операций с кнопками, прибор автоматически возвращается в режим «работа» без записи измененных параметров. Выход с записью новых параметров в энергонезависимую память осуществляется кратковременным нажатием кнопки по окончанию цикла программирования первого уровня. Прибор при этом перейдет в режим «работа».
Вход на второй уровень программирования осуществляется нажатием и удерживанием кнопки более 6 сек. в режиме "работа". По истечении шеститисекундной паузы необходимо ввести код доступа к программированию функциональных параметров. Код доступа необходим для защиты от несанкционированного изменения рабочих режимов прибора. Он вводится с использованием кнопок и . Кнопкой изменяют величину, а кнопкой положение изменяемой цифры кода. В зависимости от введенного кода осуществляется доступ к программированию определенных групп параметров:
|
Код доступа
|
Группа параметров
|
|
1713
|
Параметры измерительной части, интерфейсный номер, запрет изменения уставок, функция дополнительного ВУ
|
|
5326
|
Параметры ПИД
|
|
9182
|
Отключение автоматической компенсации температуры холодного спая термопары
|
|
0001
|
Включение автоматической компенсации температуры холодного спая термопары
|
Последовательность работы с прибором на втором уровне программирования приведена на рис. 9. Функциональные параметры УМКТ приведены в таблицах №3 и № 4.
Кнопки и предназначены соответственно для увеличения и уменьшения выбранного параметра. Однократное нажатие на кнопку изменяет параметр на единицу. При удерживании кнопки изменение происходит автоматически с возрастанием скорости изменения. Переход от одного параметра к другому осуществляется кратковременным нажатием на кнопку . Возврат к предыдущему параметру осуществляется нажатием на кнопку при вжатой кнопке . Если в течении 20 секунд не производится операций с кнопками, прибор автоматически возвращается в режим «работа» без записи измененных параметров. Выход из режима программирования с записью новых параметров в энергонезависимую память осуществляется кратковременным нажатием кнопки по окончанию цикла программирования второго уровня или удерживанием кнопки более 6 сек. в процессе программирования.
Функциональные параметры УМКТ(У)(ПИД)(-К) (второй уровень программирования)
Таблица №3
|
Параметр
|
Диапазон изменения
|
Комментарий
|
Заводская установка
|
|
xxxx
|
см. табл. №1
|
Тип входного датчика
см. таблицу №1
|
С`50
|
|
An.L
ххх.х
An.H
ххх.х
|
-999...+3000
-999...+3000
|
Масштабные коэффициенты для датчиков с унифицированным выходом:
Масштабный коэффициент, соответствующий 0% шкалы
Масштабный коэффициент, соответствующий 100% шкалы
|
0.0
100.0
|
|
tb x
|
0
1
|
Логика работы
Охладитель
Нагреватель
|
1
|
|
PF.xx
FF.xx
|
0...99
1…10
|
Параметры цифрового фильтра:
Полоса цифрового фильтра. При PF=0 полоса фильтра отключена.
Глубина цифрового фильтра.
|
30
2
|
|
SH_1
xxx.x
Р.х.хх
|
-99.0...+99.0
0.90…1.10
|
Коррекция характеристики:
Значение сдвига характеристики
Значение наклона характеристики
|
0.0
1.00
|
|
bd x
|
0
1
2
3
4
|
Параметры ВУ2(для УМКТ(У)(ПИД)):
Выключено
Сигнализация о выходе за заданный интервал
Сигнализация о входе в заданный интервал
Сигнализация о превышении уставки Т2уст
Сигнализация о нахождении ниже уставки Т2уст
|
0
|
|
n.xxx
|
1…255
|
Интерфейсный номер прибора
|
1
|
|
SC. х
|
0
1
|
Разрешено изменять параметры 1 уровня
Запрещено изменять параметры 1 уровня
|
0
|
Параметры ПИД УМКТ1(У)(ПИД(-К)) (второй уровень программирования)
Таблица №4
|
Параметр
|
Диапазон изменения
|
Комментарий
|
Заводская установка
|
|
HP
xxxx
|
1…65000
|
Полоса пропорциональности
|
10
|
|
ti
xxxx
|
0…30000
|
Постоянная интегрирования
При ti=0 И-звено выключено
Не оказывает влияния на модификацию УМКТ1(У)(ПИД-К)
|
100
|
|
td
xxxx
|
0…30000
|
Постоянная дифференцирования
При td=0 Д-звено выключено
|
20
|
|
tP
xxx
|
1...100
|
Период управляющих импульсов
|
1
|
|
SP
хххх
|
0…1000
|
Скорость набега на уставку
При SP=0 ограничение скорости выключено
|
0
|
|
РА
ххх
|
1…100
|
Максимальная мощность
|
100
|
|
РI
ххх
|
0…99
|
Минимальная мощность
|
0
|
9. Техническое обслуживание
9.1. Техническое обслуживание прибора проводится не реже одного раза в шесть месяцев и состоит в контроле крепления прибора, контроле электрических соединений, а также удаления пыли и грязи с клеммника прибора.
9.2. Ремонт и калибровка прибора осуществляется на предприятии изготовителе или в сертифицированных им центрах.
9.3. Поверку прибора проводят территориальные органы или ведомственная метрологическая служба потребителя, имеющая право поверки. Требования к поверке, порядок и этапы проведения определяются методикой поверки УМКТ.421729.005 МП. Методика поверки находится на http://www.fea-samara.ru.
Межповерочный интервал- 2 года.
10. Маркировка
10.1. На прибор наносятся:
- условное обозначение типа и модификации прибора;
- класс точности;
- знак предприятия изготовителя;
- заводской номер;
- год изготовления;
- изображение знака утверждения типа.
11. Упаковка.
11.1. Упаковка прибора производится по ГОСТ 9181-74 в потребительскую тару, выполненную из гофрированного картона.
11.2. Упаковка изделий при пересылке почтой по ГОСТ 9181-74.
12. Хранение
12.1. Прибор хранить в закрытых отапливаемых помещениях в картонных коробках при температуре окружающего воздуха от 0 до +60 гр.С. и относительной влажности воздуха не более 95% при температуре 35 гр.С.
12.2. Воздух помещения не должен содержать пыли, паров кислот и щелочей, а также газов, вызывающих коррозию.
13. Транспортирование
13.1. Прибор в упаковке транспортировать при температуре от –25 гр.С до +55 гр.С, относительная влажность не более 98% при 35 гр.С
13.2. Транспортирование допускается всеми видами закрытого транспорта.
13.3. Транспортирование авиатранспортом должно производиться в отапливаемых герметизированных отсеках.
14. Комплектность
14.1. Прибор 1 шт.
14.2. Паспорт 1 шт.
14.3. Руководство по эксплуатации 1 шт.
Приложение №1. Эскизы корпусов УМКТ1(ПИД).
1. Корпус настенного крепления Н1.
2. Корпус щитового крепления Щ2
Вырез в лицевой панели щита
Приложение №2.
Подключение датчиков и выходных устройств.
Подключение УМКТ к ПК
